TOWER TAKEOVER
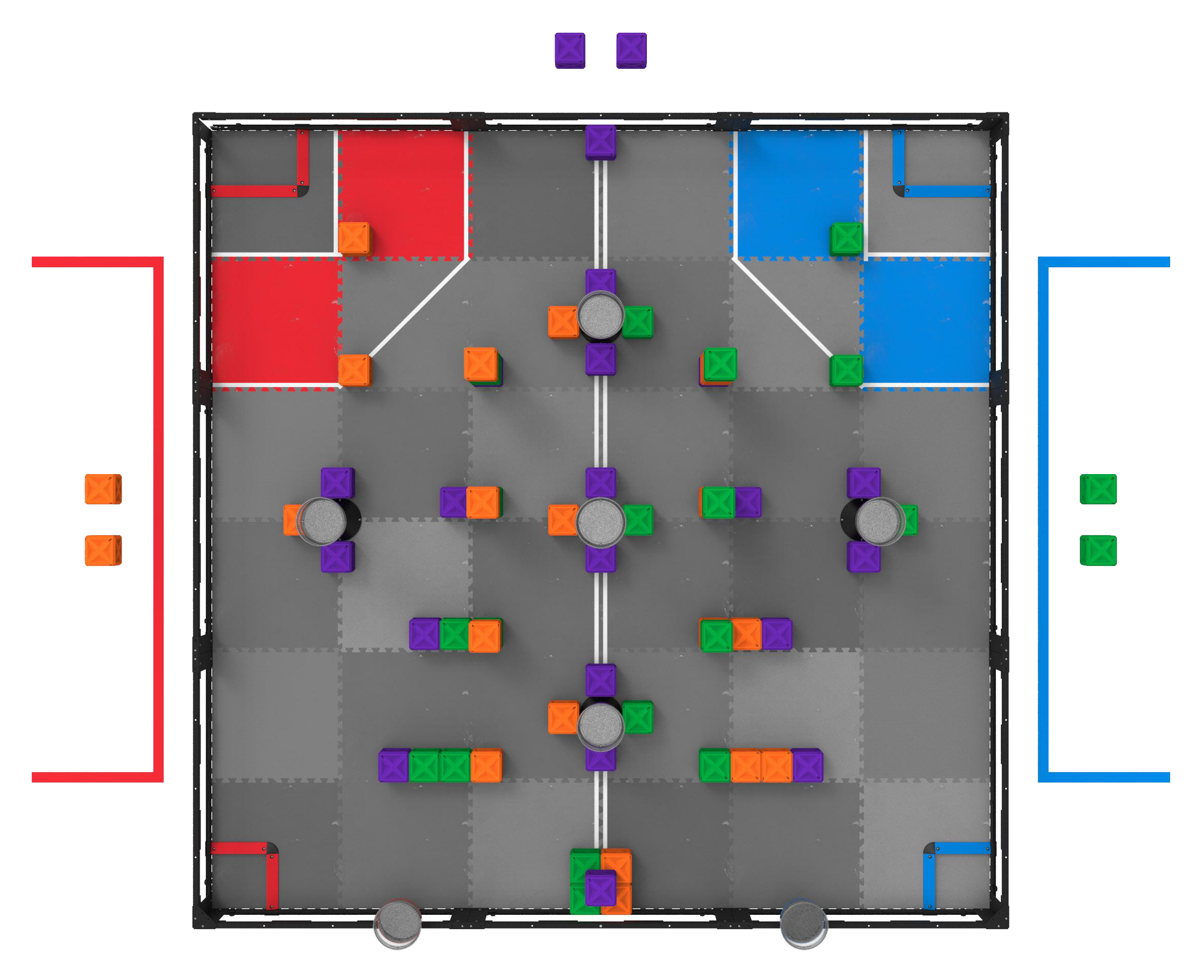
VEX Robotics Competition Tower Takeover is played on a 12’x12’ square field configured as seen above. Two Alliances – one “red” and one “blue” – composed of two Teams each, compete in matches consisting of a fifteen second Autonomous Period, followed by a one minute and forty-five second (1:45) Driver Controlled Period. The object of the game is to attain a higher score than the opposing Alliance by placing Cubes in Towers, or scoring Cubes in Goals.
For the 2019-2020 Tower Takeover season, we designed and built 3 different robots, each with different features and improvements. Our mechanical strategy for this season was to have a versatile robot capable of stacking large amounts of cubes as well as placing cubes in towers. The CT19.1, CT19.2, and CT19.3 are all built upon this initial strategy. All of our robots this year are considered “tray bots” as they have a long tray for holding and stacking cubes.
CT19.3
The CT19.3 was our final robot for the season, and had an arm for scoring towers and an extended tray for stacking cubes. Many improvements to the arm were made, making it more precise and reliable. The chassis was cut down by a lot in terms of length and width to improve manoeuvrability, especially for stacking deep in the large goal. There was also a cube lock system for cubes to be stored on the tray while scoring towers. This robot ran a mecanum chassis, and was capable of holding up to 12 cubes.

CT19.2
The CT19.2 was our second robot for the season, which greatly improved on the first robot. This robot had the all-new addition of an arm, which could lift cubes into the towers. The tray was extended to allow stacking up to 10 cubes, and the mecanum chassis was slimmed down width wise for manoeuvrability. The intakes were also changed to a flip down mechanism for better reliability, and there was a redesigned anti tip for more strength.

CT19.1
The CT19.1 was our first robot for the season. This robot had a 9-cube tray, as well as a mecanum drive chassis. The intakes would deploy by sliding down two beams, and the tray would fold into a triangular position at the start of the match.
