CHANGE UP
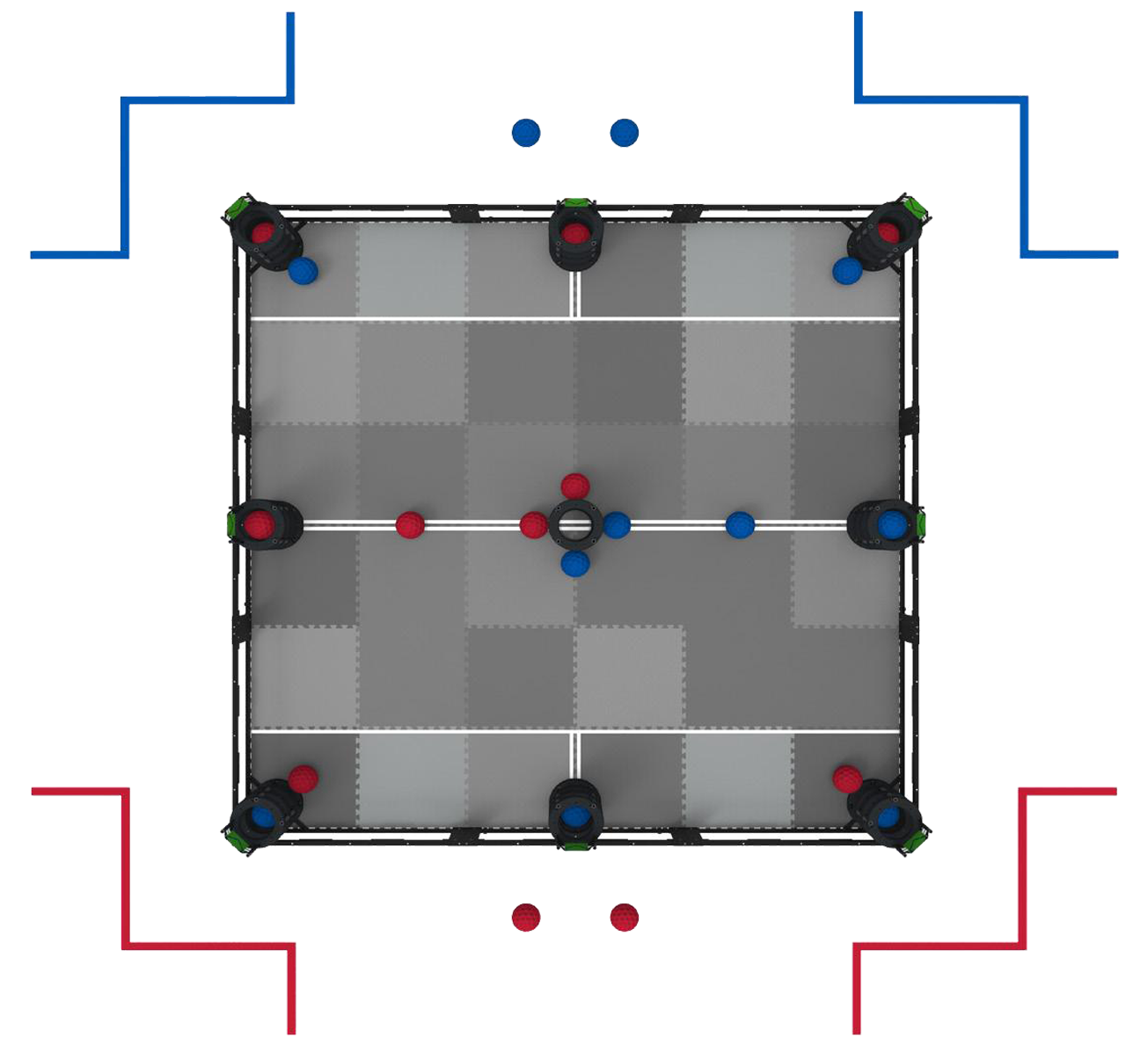
VEX Robotics Competition Change Up is played on a 12’x12’ square field configured as seen above. Two Alliances – one “red” and one “blue” – composed of two Teams each, compete in matches consisting of a fifteen second Autonomous Period, followed by a one minute and forty-five second (1:45) Driver Controlled Period. The object of the game is to attain a higher score than the opposing Alliance by placing Balls in Goals, and Connecting Rows.
For the 2020-2021 Change Up season, we designed and built 3 different robots, each with different features and improvements. Our mechanical strategy for this season was to have a fast and reliable robot, because we knew the importance of getting a good Robot Skills score this season. The CT20.1. CT20.1+, and the CT20.2 EQX are all built upon this initial strategy. All of our robots this year are considered as “cycle bots” or “snail bots” as they can bring balls from the bottom of the goal to the top.
CT20.2 EQX
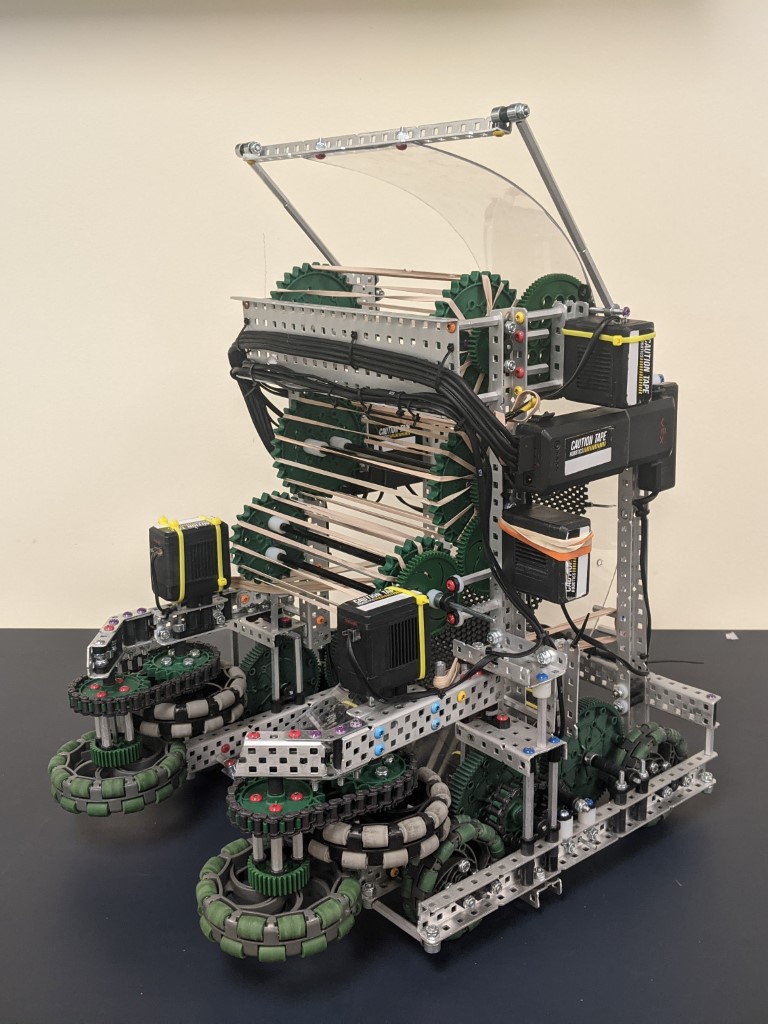
The CT20.2 EQX was our final and best robot for the Change Up season. This robot featured a completely new design, as well as added speed for scoring and new smart features. This robot was started during the winter break, in December. Our third-generation robot used a completely new chassis, as it was running on an X-drive. It had new straight intakes and straight indexers, to improve speed and reliability. A backboard was added, so that the balls could be guided smoothly into the goal. New features such as Odometry, Ball Tracking, and Ball Sensing were added to the robot.
CT20.1+
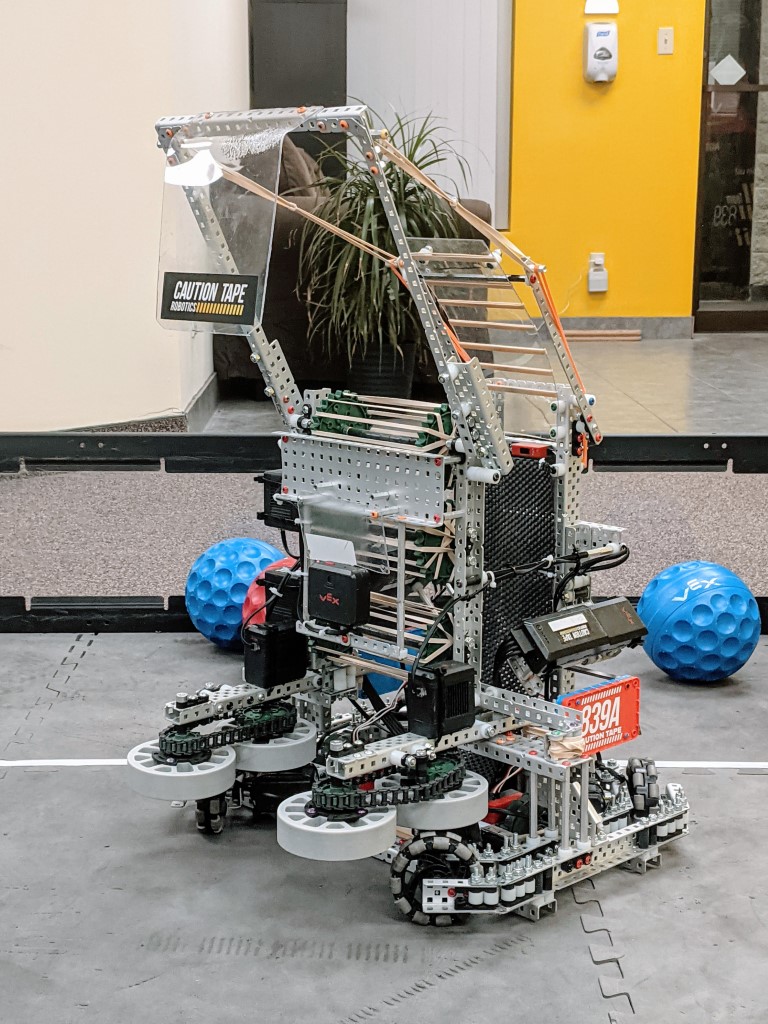
The CT20.1+ was an incremental update from the prior robot, and saw a major carryover from the CT20.1. Our second robot was more of a refinement than a full redesign. In this iteration for instance, our main structure remained the same, however it saw major design improvements to the intake system, as well as the hood. We improved the intaking system by changing the 4-inch intake omni wheels to the newly legal 4-inch Flex Wheels, for added traction. This really helped us with de-scoring, especially on the corner goals. We swapped out our old hood with a new hood that could score balls more reliably as well.
CT20.1
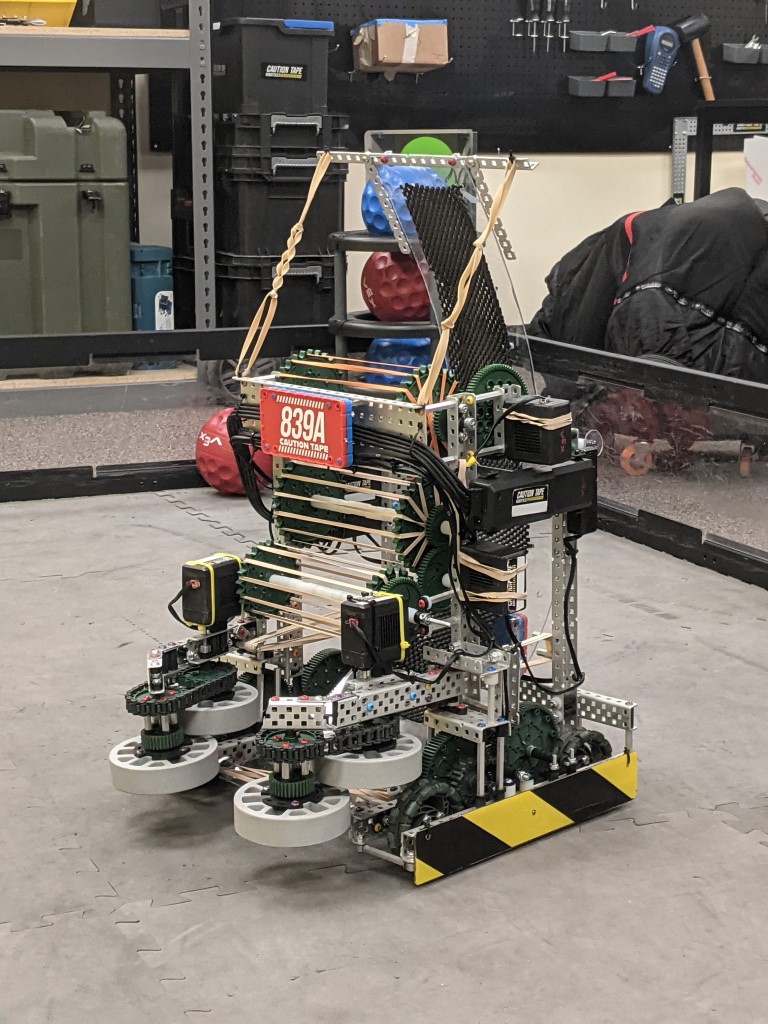
The CT20.1 was the first competition worthy robot we designed and built, after the summer testing phase. For our chassis/drivetrain we chose to gear it up 3:7 on 3.25-inch wheels. This gives us incredible speed around the field. In addition, we also use a unique stair stacked motor design, which allows our exact gear arrangement, while also allowing space for balls to pass through. For our intake, we used an offset inwards front intake wheel system, which gives more traction for the ball to de-score, as well as stacked 4-inch omni wheels for extra grip. The indexer we used was geared to be speedy, which meant the balls could exit the robot faster.